Week 2 (1/14 – 1/20)
Charging Station:
Main goal: have it all autonomous (as a function of the button board)
Sensors: Use gyroscopes like NavX to record the angle of the robot and then adjust to level out the charging station when the robot is on the platform.
3d Mobile Electrical Panel:
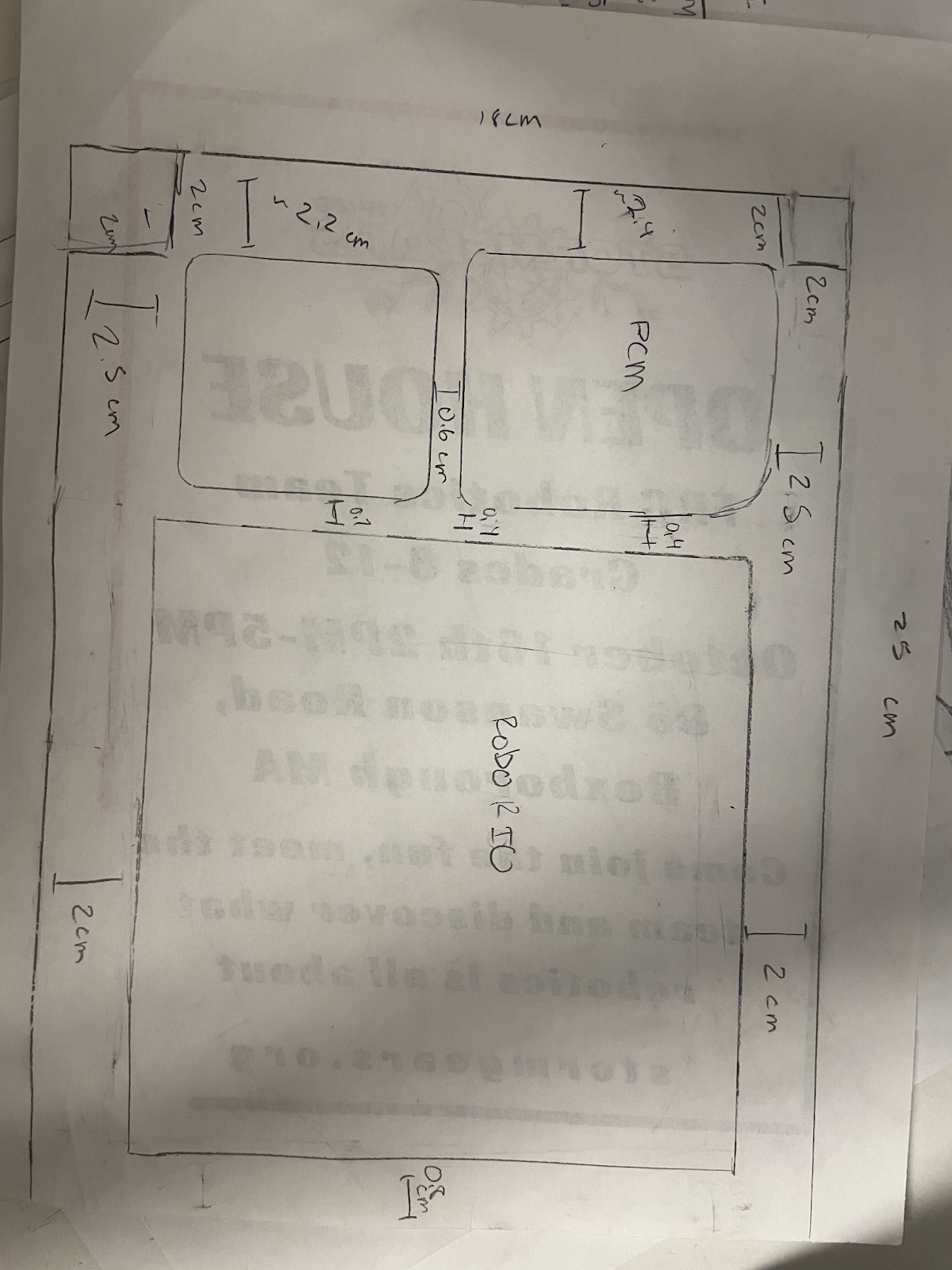
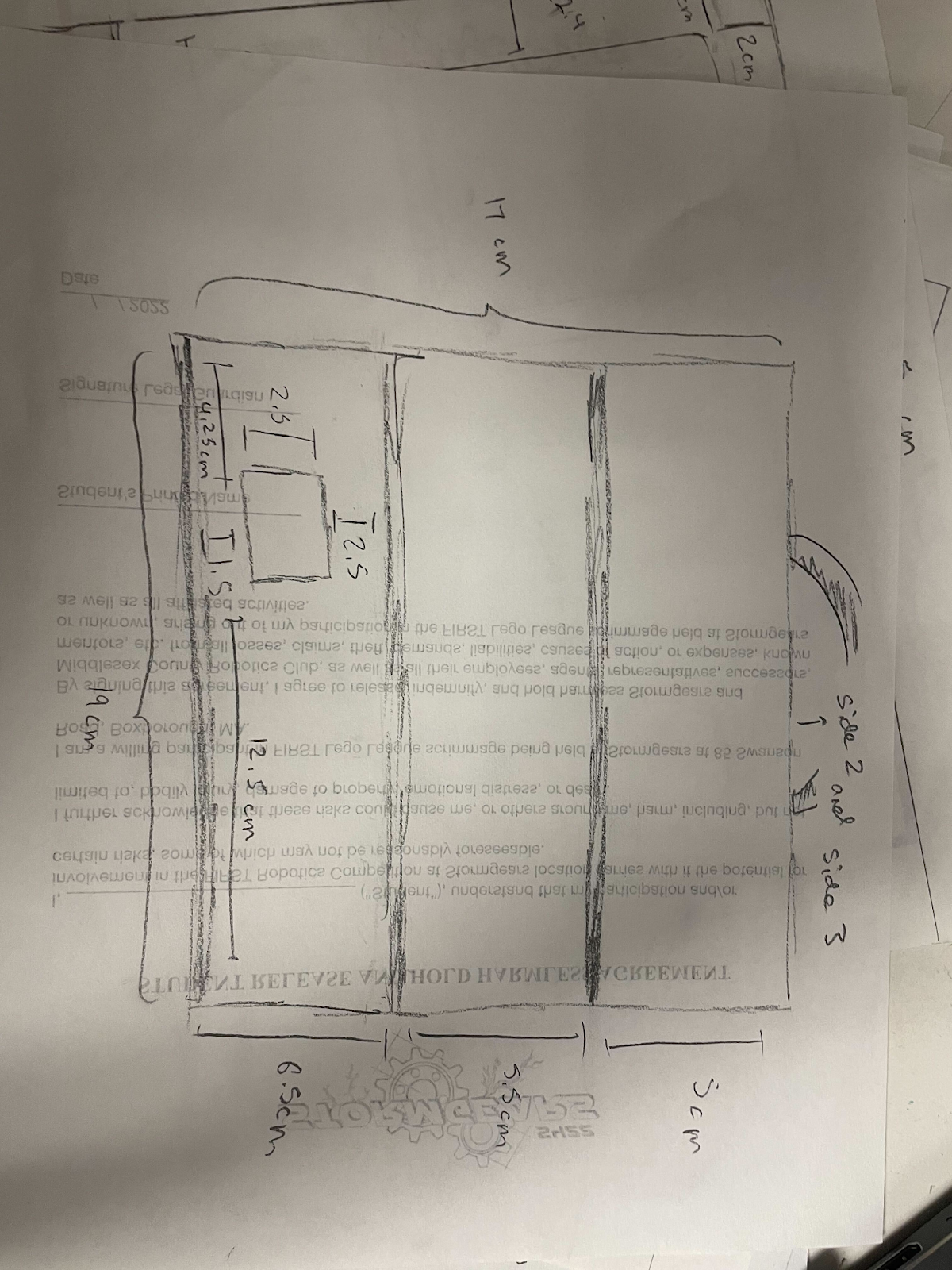
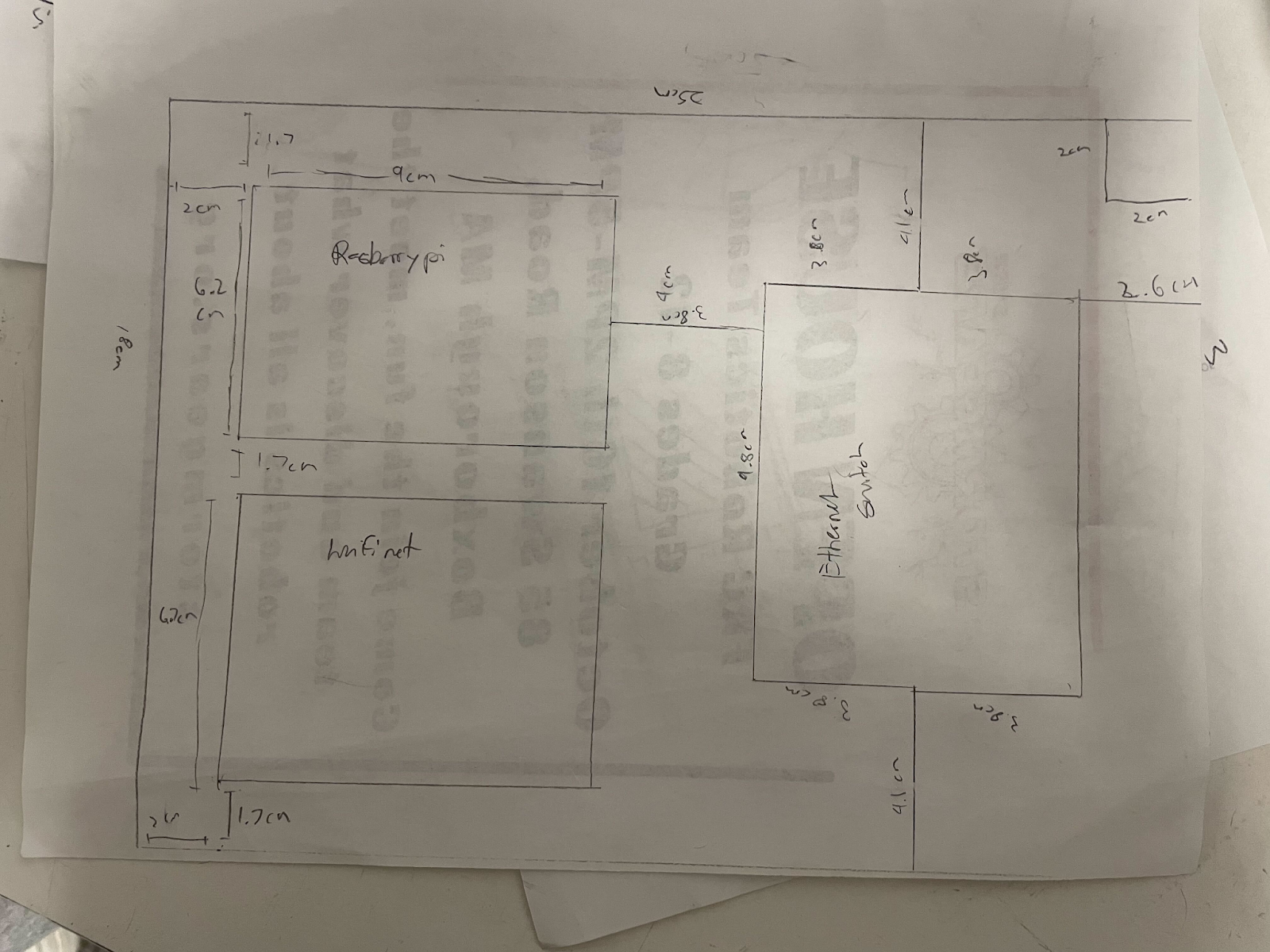
We created a sketch for a mobile electrical panel that can be taken from one robot, and used for another. There are 3 layers in order to reduce the size and make it easier to move. There is one layer with a Power Distribution Hub(PDH), the second with the Roborio, and the third layer with the Ethernet, Raspberry pi, and Wifi/ Radio.. The dimensions for the panels are 26 cm for the length, 19 cm for the width, and 17 cm for the height. There are 2 handles for handling and moving the box between different robots. There are gaps between the different sides and layers for the connection of the wires. We added a hinge on one side to slip the layers inside the box. The next step was to CAD the design.
Here are a few pictures to illustrate what we were looking for: